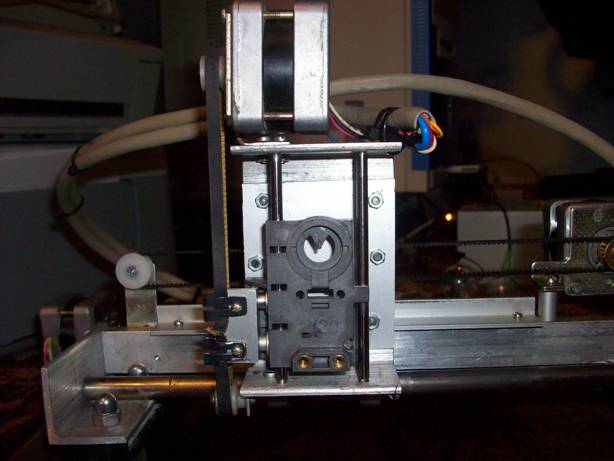
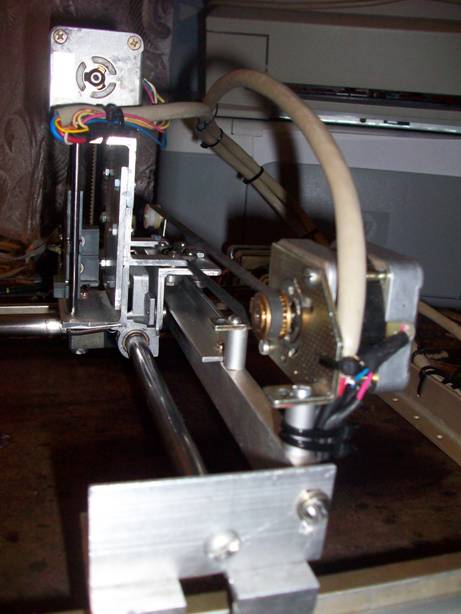
Из принтеров извлекаются направляющие, каретки с подшипниками скольжения, шаговые двигатели, зубчатые ремни и шестеренки.
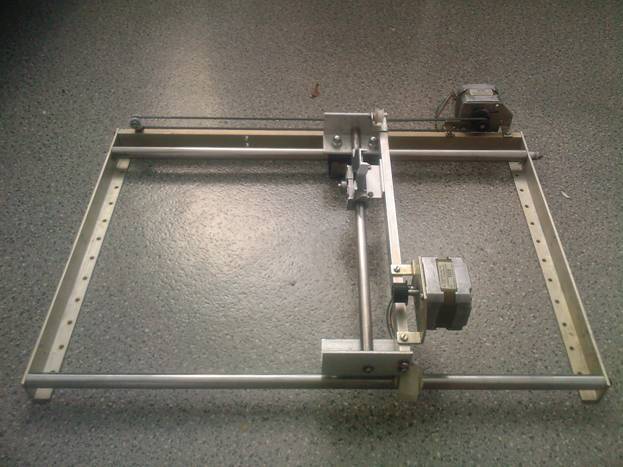
Используя алюминиевый уголок, собирается каркас будущего станка.
Прикручиаем каркас к основанию из ДСП или другого подходящего материала. Основание должно быть жестким и тяжелым.
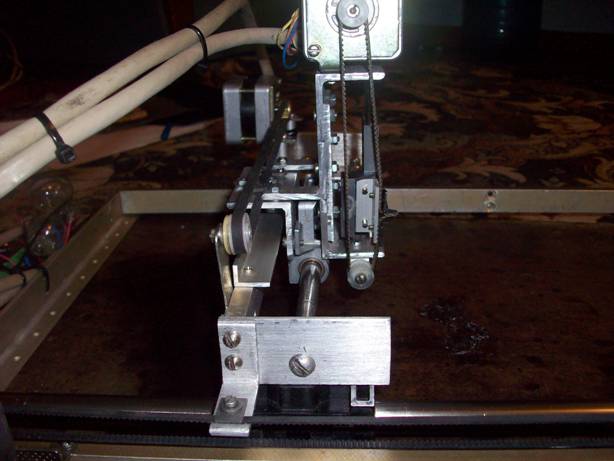
Координата Z изготовлена из остатков 5 дюймового дисковода (использованы направляющие и подшипники скольжения) и алюминиевого уголка.
Механика готова.
Чтобы оживить станок, нужен контроллер шаговых двигателей. Он также собран с использованием деталей от старых компьютеров. Контроллер поддерживает только полу шаговый режим.
Питание всей электроники производится от компьютерного блока питания.
Станок изготавливался только для выжигания и рисования маркером, но в дальнейшем захотелось попробовать, что то посерьезней .
Недостатки данной конструкции:
Нужно постоянно подтягивать ремни(растягиваются)
Координата z из флопика слабовата для фрезеровки , быстро износится.