| Меню сайта |
|
 |
| Модели |
|
|
|
Плотер из принтера
Плотер из принтера
Шаговые двигатели от 5,25 дисководов, направляющие с каретками от матричных принтеров OKI, зубчатые ремни от матричных принтеров EPSON и т.д. и т.п.
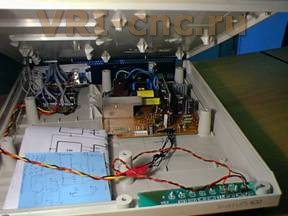
В качестве несущего корпуса использован корпус от SmartUPS-400, в который помещены плата блока питания (импульсный от принтера) и интерфейсная плата. На крышку корпуса с помощью коротких дюралевых уголков установлены направляющие Х с каретками. Привод кареток Х производится с двух сторон, при этом упрощаются требования к жесткости и перекосам. Обе каретки соединены направляющей (нижней) Y, по которой перемещается каретка пишущего узла. Подъем ручки (фломастера) производится соленоидом, опускание под собственным весом.
Вот что получилось:
 
Формат рассчитывал на А4, получилось на 1,5см меньше с каждой стороны.
Перемещение по X и Y получилось 11мм за 100 шагов то есть 0,11мм на шаг (продиктовано размером зубчатого шкива от HP DeskJet).
Скорость перемещения достаточно высокая (зависит от управляющего компьютера).
Как видите, конструкция получилась достаточно простая – никаких шариковых опор, токарных и фрезерованных деталей и в тоже время, позволяющая Вам получить опыт в изготовлении подобных конструкций для других задач. На ней Вы сможете проверить возможности управления механизмами от компьютера, оценить силовые характеристики использованных двигателей, увидеть «подводные камни» о которых не подозревали, попробовать себя в программировании и т.д.
Теперь о некоторых нюансах.
Поскольку конструкция планировалась только для рисования (снижаются требования к жесткости), соответственно, все узлы максимально просты и облегчены. Направляющие по Х – пустотелые, поддерживающая направляющая Y – пластмассовая, в качестве держателя ручки (фломастера) использована тара от валидола и нитроглицерина (вставлены друг в друга), нижняя направляющая Y и каретка пишущего узла от НР DeskJet (в ней имеется крепление к зубчатому ремню), подъем ручки (фломастера) осуществляется соленоидом от факса. В общем, кое-что видно на фотографиях (правда не очень – фотоаппарат не позволяет снимать с близкого расстояния).
Аппаратные решения.
 
Блок питания выдает 24 и 5 вольт. Шаговые двигатели ПБМГ-200-265 с сопротивлением обмоток около 80 Ом. Сопротивление обмотки соленоида 24 Ома. На каждой оси установлены по два микропереключателя один для исходного положения, другой для ограничения, причем на оси Y роль переключателей может меняться местами для работы в ACAD или QBASIC. Интерфейсная плата осуществляет оптронную развязку (настоятельно рекомендую) и управление моторами и соленоидом через микросхемы, собрана на оптронах 4N32, К555АП3 и ULN2803.
 
Для первоначальной проверки работоспособности шаговых двигателей и их фазирования использовался тестер (на фото ниже).

|
|
|
Комментарии
|
|
| Реклама |
|
|
|
|
|
|